工業技術研究院 資訊與通訊研究所 康又升 吳俊民
前言
由國際標準組織第三代合作夥伴計劃(Third Generation Partnership Project, 3GPP)提出的未來非地面網路(Non-Terrestrial Networks, NTN)議題中,高空通訊平台(High Altitude Platform Station, HAPS)是一個相當受到關注的議題,平台所搭載的無人載具可以是氣球、無人機或飛船等,可以做為相當重要的通訊中繼和監控工具。本文以飛船作為平台載具,因其具有滯空時間較長、空運能力較佳以及成本較低等特點,可為未來的通訊連結方式及應用提供一種新的可能性。其中,飛船在救災通訊的應用情境扮演相當重要的關鍵角色,例如當災害發生造成地面通訊設施損壞導致通訊中斷時,飛船可以快速部署臨時的通訊連結,協助救災人員傳輸重要資訊,並進行救援行動的調度與監控任務,此外,隨著市場上4K和更高解析度影像的普及,需要更高速的傳輸速率來支援這類影像的傳輸,因此,我們也進行實際場域驗證,使用飛船進行4K影像串流以及即時操控,目前已成功完成在一公里的高空對此項技術的驗證。最後,本文也將探討後續如何利用這些技術,在未來設計一艘能飛行至20公里高空的飛船來建置非地面網路的高空通訊平台,並透過這個平台進一步提升國內相關產業的技術應用能力。
飛船系統應用架構
飛船系統的應用包含許多不同的應用情境,其中,高空偵蒐的情境是飛船應用的情境之一,以此情境為例,飛船系統應用架構主要包含以下三個部分:
飛船操作系統:飛船會配備一套高度自動化的飛船操作系統。當飛船從地面發射升空時,這套系統會依據預先設定的飛行路徑,使用其導航儀來確保正確的航向。而當飛船到達目標高度時,系統會讓飛船維持在預定的軌道上,以利於對地面的持續偵蒐。另外,飛船的電力可由氫燃料電池作為長時間滯空之使用以及鋰電池進行短時抗風之使用,目的在保障長時間運作所需的能源。
數據傳輸鏈路:地面站使用兩種數據傳輸鏈路來操控飛船,例如調整其飛行路徑或是變更偵蒐任務的內容,一種為900MHz的數據傳輸與飛船控制器串接,藉以收集從飛船上傳回的電壓、電流、溫度與地理位置等資訊,並命令飛船移動,另一種為酬載用的高傳輸速率的5GHz通訊傳輸鏈路,酬載將透過該鏈路提供即時的影像及偵蒐訊息回傳,這部分與酬載相關,因此,在本文中,我們將連同酬載於影像偵蒐系統中加以說明。
影像偵蒐系統:酬載是飛船主要的影像偵蒐工具,包括各種感測器、照相機等設備。感測器可以監測環境條件,例如溫度、壓力、濕度等。照相機則可以拍攝地面的照片,而這些照片的解析度高到可以辨識出地面上的細節。
以下我們將就這三部分進一步說明。
飛船操作系統
飛船操作系統的核心組件是螺旋槳,如圖 1紅圈處。這些螺旋槳通常位於飛船吊艙的兩側,並由獨立的馬達驅動。螺旋槳配置有伺服馬達進行方向旋轉控制,因此,這些螺旋槳可以朝向不同方向旋轉,從而產生向前、後、上、下的推力。透過調整兩側螺旋槳的轉速和旋轉方向,可以控制飛船的運動方向和速度,此外,尾舵部分包含兩個控制介面,一個為控制偏行角(Yaw) ,如圖 1中,黃色圈與綠色圈的部分,其中,黃色圈部分為以伺服馬達帶動偏轉的舵面,而綠色圈則為透過旋翼讓飛船偏轉,而另一個控制俯仰角(Pitch) ,如圖1藍色圈部分,可透過舵面的上下偏轉,操作飛船的俯仰角度,而因為飛船的操作特性,不會透過滾翻(Row)進行飛船的控制,因此操作尾舵時不會出現透過滾翻進行飛船的轉彎航行[1]。

飛船操作系統的運作需要配備相應的控制器,例如飛行控制系統或遙控器。通過這些控制器,飛船的操作員可以通過改變螺旋槳的轉速、尾舵的角度以及俯仰角控制舵的位置,來實現對飛船的精確控制。總結來說,飛船操作系統由主螺旋槳、方向控制尾舵和俯仰角控制舵等元件所組成,這些元件的協同工作使飛船能夠實現向前、向後、轉向以及上升和下降的運動,並透過配備對應的控制器,可以達到精確控制飛船的運動和姿態,以完成所需的任務目標。
數據傳輸鏈路
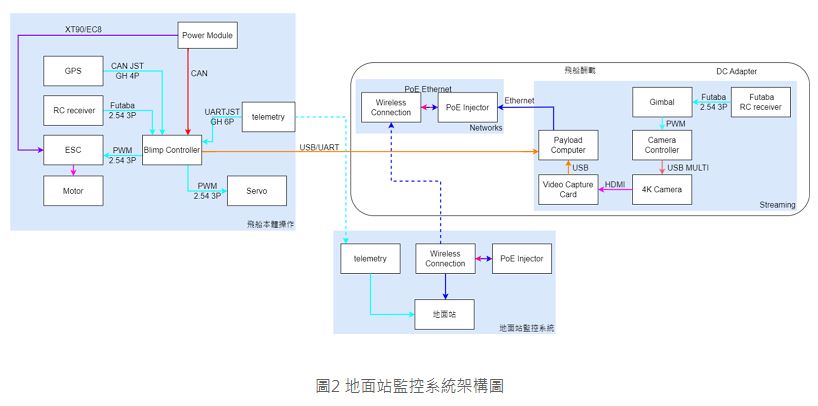
如圖 2中淡藍色虛線,飛船地面站可以即時監控,透過900MHz之數據傳輸通道與飛船即時連結,並即時監控飛船的系統姿態、如速度、磁力計狀況和GNSS資訊,同時也透過地面站偵測系統,繪製並規劃任務的航點,或是定點執行。而在飛船無法自動處理的狀況,如遇見螺旋槳失效,可藉由地面站即時了解其失效情形,並進行單螺旋槳的降落,切斷失效螺旋槳的電源,減少飛船墜毀的情況。
透過飛船地面站,除即時監控飛船本體外,尚可監控飛船酬載的狀況,如後述實際場域驗證中提到,可透過飛船地面站操作相機雲台以及相機的錄影,達到既能操作相機雲台進行監測、也可監測相機狀況的可行性。
影像偵蒐系統
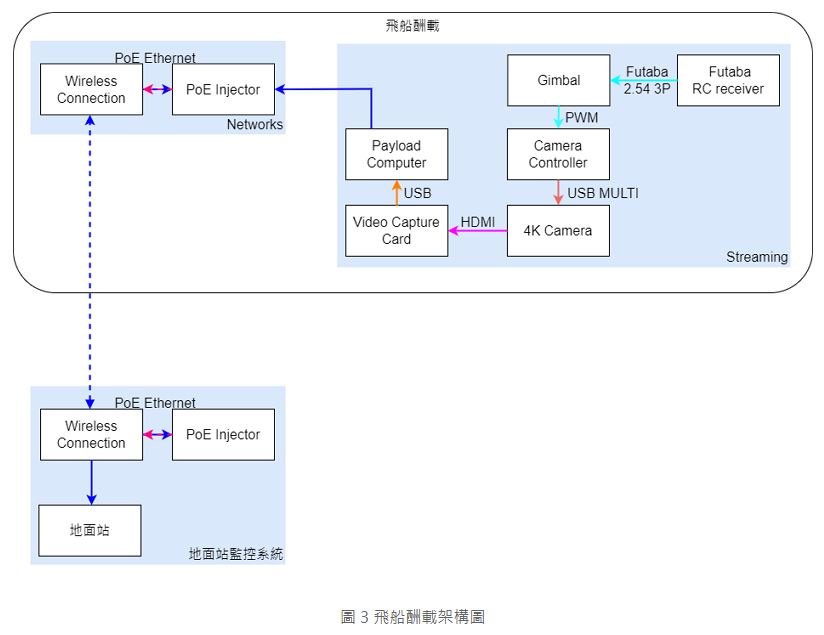
目前已測試兩種類型的飛船酬載,分別為飛船影像收集與飛船高速通訊系統,而結合這兩種酬載可以得到即時監控地面影像的能力,以下將說明這兩套系統的內容,如圖 3所示,Network藍色方塊是高速通訊傳輸技術的天空酬載,而Streaming則是高畫質影像偵蒐的酬載,其中,藍色實線箭頭為透過有線網路進行串接,而藍色虛線則為高速網路傳輸對地面站進行通訊的部分。
高畫質即時影像傳輸技術
由於科技的進步與創新使得飛船的操作技術與影像偵蒐系統的應用,兩者能緊密結合,為我們的生活與研究領域開創更多的可能性。在下文中,我們將會討論高畫質即時影像傳輸與飛船操作技術的關聯。
首先,飛船的操作技術仰賴於優良的控制系統。飛船的螺旋槳和尾舵是飛船控制的核心組件,這些部分可以透過專門的馬達驅動並精確控制其轉速和旋轉方向,從而改變飛船的移動方向和速度,實現精確的運動和姿態控制,以達到各種偵蒐任務的需求。
而在飛船影像偵蒐系統部分,飛船通常會裝載一套高解析度的相機設備,這種相機能夠提供4K的高解析影像,讓我們能夠捕捉到更多的細節和資訊。為了讓這些高解析度的影像能夠被即時地傳輸回地面站,飛船會配備一套高速無線網路傳輸系統。這套系統不僅可以實現高速的數據傳輸,更可以保證影像資料的完整性和即時性。
另一個關鍵的組件是相機的控制器(Camera controller)。這個控制器可以利用內建的陀螺儀來偵測飛船的動態變化,並且透過控制系統來修正相機的角度。因此,即使飛船在風中搖晃,這個控制器也能保證相機的視角保持穩定,進行精確的影像收集。
高速通訊傳輸技術
為了將飛船上的高畫質影像即時傳遞至地面站,飛船上搭載了無線數據傳輸的設備,透過地面上的指向性天線與天空端的全向性天線進行串接,達到透過4K影像即時傳遞之功用。地面站的指向性天線使用了追蹤系統進行飛船的追蹤,透過飛船的900MHz回傳的GPS資訊,提供地面站通訊對準系統需指向的位置,達到提升通訊品質的功用。當然近年來,為了籌載指向的精準控制以維持較長時間的穩定連線,對準追蹤控制技術(Pointing-Acquisition-Tracking, PAT)技術成為高空飛船關鍵技術,PAT對準控制技術,一般傳統的作法是從初始對準後開始執行粗部及細部的擷取,最後進入追蹤階段。如果在連結的過程中因特殊因素導致追蹤失敗或中斷,則重新執行整個流程,如圖 3所示,為使用基於雲台(Gimbal-based)的控制器來進行的精準控制,雲台控制是具有大角度運動範圍的控制器,適合用於高空飛船對地面間的應用情境。而未來PAT技術應用於高空載具系統的發展關鍵,將是應用光通訊傳輸技術進行遠距離PAT對準控制演算機制。美國航空發展局SDA3.0標準目前已規範PAT對準最大週期於100秒以內完成的相關規格,因此,國內相關業者需以此為應用發展之目標,以作為未來高空通訊平台控制器發展規格的參考依據。
實際場域驗證
實際場域驗證中,我們使用了兩個不同系統的飛船,一個是氫燃料動力的飛船,透過雙螺旋槳,於離地600m高空進行盤旋,其中氫燃料電池提供了飛船六小時的動力飛行,另外,搭載AIS與DOA系統進行船舶識別以及訊源追蹤等功能;而另一方面,在研發中的19m飛船飛行測試中,我們使用鋰電池單獨供應四個螺旋槳電力,並搭載DOA酬載以及4K串流設備進行偵蒐。
我們選擇在台南走馬瀨農場透過飛船搭載4K攝影機以及數據傳輸模組進行了實際場域驗證,並達到150 Mbps的傳輸速率。走馬瀨農場由曾文溪中游三面環繞,阿里山支脈烏山嶺四邊環抱,面積達120公頃,其中40公頃為草原,實驗場地(草原)高度海平面63m,附近丘陵約100~200m,我們在走馬瀨上空進行抗風飛行,並透過雙螺旋槳的飛船進行實測驗證,使用全向性天線進行數據傳輸,透過雲台自動穩定操作飛船酬載的指向,並且透過攝影機取得附近的地形地貌。
在飛行操作時,實際使用Sony 4K 相機進行數據傳輸,並透過地面站搭載4K 電視進行影像即時監測,飛船透過影像擷取器,取得相機提供出的RAW影像,並透過擷取盒將影像擷取入酬載電腦中,而酬載電腦則將該影像透過H.265方式進行壓縮,並透過高速無線網路串流至地面站上。
飛船酬載系統具備高速無線網路回傳功能,使得飛船能夠即時地將影像資料傳送至地面站或其他指定的接收器。這種無線網路回傳技術能夠實現高頻寬的數據傳輸,確保影像的迅速傳輸,讓使用者能夠及時獲取所需的資訊。
未來應用探討
飛船作為一種可長時間滯空的載具,在未來的通訊應用中將是不可或缺的存在,根據其特性,在非地面通訊中將佔有一席之地,而救災的場域上亦可透過飛船,提供長時間的通訊管道。而3GPP中定義的空中鏈路(Inter-aerial links, IAL) [2],也可透過光通訊來實現,如前所述,PAT對準系統則是IAL不可或缺的重要技術。
非地面通訊系統
根據3GPP TR38.811中提出非地面通訊系統幾個飛船用於通訊的情境其中,IAL是一個重要的發展項目,作為3D立體組網的重要功臣,如衛星與衛星之間的串聯,飛船也可做為3D立體組網的網路載體,在空中提供重要的通訊網路。由於飛船的特性,可以做為衛星通訊鏈路外的第二選擇。
救災通訊中繼
災區道路毀損人員無法抵達,無法在地面重建臨時通訊、亦難以得知災區內部狀況,若能利用無人飛船群迅速升空,突破地形限制飛至行動網路嚴重毀壞的災區,自動快速形成臨時救災無線中繼通訊網路,透過飛船搭載飛船間通訊,以及提供災民使用的行動網路微型基地台,可以做到長時間於災區進行部屬,提供防災應變中心、前進指揮部、災民的通訊串聯,輔助後勤即時指揮及調度,災民也可藉此通訊發出求救訊息或向家人報平安。
結論
飛船作為可長時間滯空的載具,根據其優秀的載重以及較低的能源損耗,可以作為多種類型的用途。而在國際間,高空無人載具也成為發展的主要趨勢,透過無人飛船飛行至20公里以上的平流層,結合內外氣囊調節氣壓,可以達到數個月的滯空時間,借此特性作為通訊載具,可達到3D混合組網的功用對太空連結衛星網路,對地連結地面通訊,而作為酬載平台,則可達到高空長期偵蒐系統用途,無論是搭載攝影設備、通訊設備,或是雷達設備都可以透過飛船在高空滯留的特色進行操作,在無遮蔽的環境下提供更佳的設備運用。
參考文獻
[1] Lorenz Meier, "airframe_reference," PX4, 18 June 2023. [Online]. Available: https://docs.px4.io/main/en/airframes/airframe_reference.html.
[2] Patrick Merias, John M Meredith, Joern Krause, Study on New Radio (NR) to support non-terrestrial networks, Release 15 ed., 3GPP, 2017.