作者:林敬智、李則霖、張峻豪、連豊力
對於大多數駕駛來說,倒車入庫、路邊停車一直都是考取汽車駕照時的一大難關,也是出門在外無法逃避的問題,停車往往是考量駕駛開車技術的重要指標。近年來駕駛輔助系統興起,舉凡輔助影像或精準倒車雷達比起後照鏡能提供不少額外幫助,提供駕駛更多的資訊,有效降低停車難度。
路徑規劃亦是自動停車系統的關鍵技術之一。許多研究通過幾何計算來計劃弧形路徑[1]。在垂直停車的情況下,四分之一圓路徑的一步驟停車被廣泛使用[2]。一些研究[3]開發了基於感測器(例如超聲波感測器)的停車方法,沒有預先規劃明確路徑,而是在過程中根據障礙物調整車身姿態。文獻[4]通過超聲波感測器,弧形路徑規劃和主動控制的組合,在特定情況下實現自動停車。本單位亦於2019年機械工業雜誌發表“基於視覺停車格偵測與多階段控制之自動停車系統開發”[5],利用視覺的停車格偵測系統,用於即時處理和識別車格線,以提供車輛和格線之間的相對空間資訊。並透過開發多階段停車策略,分析環境和車輛狀態後,制定適當的自動停車規劃,並控制車輛的致動器如圖1所示,使自動駕駛車輛能完成垂直,平行和斜向車格的停車任務。
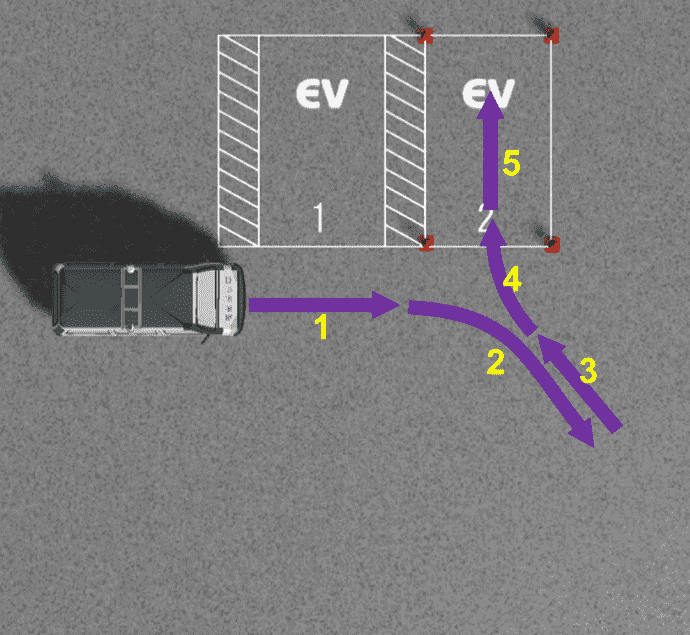
(a)垂直停車
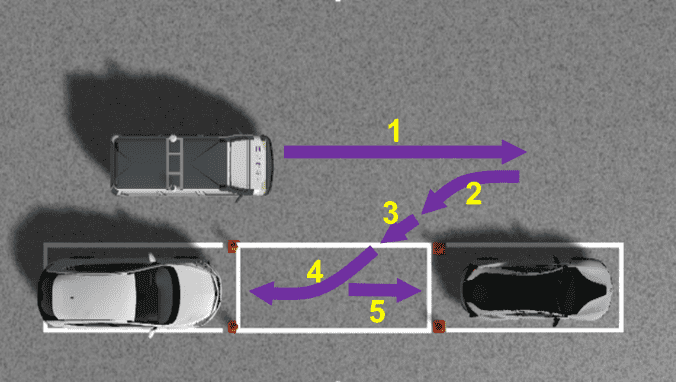
(b)平行停車
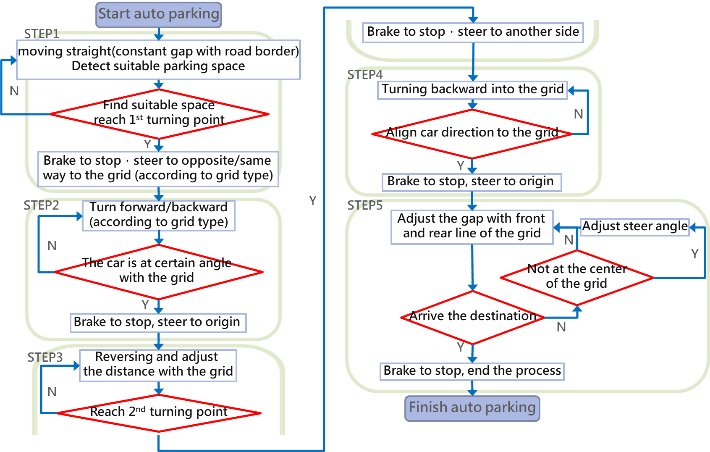
(c)多階段停車路徑規劃架構圖
圖1 多階段停車路徑規劃 (a)垂直停車 (b)平行停車 (c)多階段停車路徑規劃架構圖
然而若想讓自動駕駛車應對各種限制條件下的複雜停車情境,例如因為障礙物導致停車空間受到限制的情況下,就容易遇到技術上的困難,並非稍微修改各步驟的動作就可以解決。本文將探討本團隊於自動駕駛停車領域的發展,以及如何開發自動駕駛停車系統,突破空間限制下停車的困難。
自動停車系統發展過程與瓶頸
‧自動停車系統發展過程
2019年發表的”基於視覺停車格偵測與多階段控制之自動停車系統”。利用基於視覺的停車格辨識系統,識別附近沒有參考障礙物的停車位,選擇合適的車位,並針對不同類型的停車位進行主動轉向,加速,換檔和制動控制的全自動停車。該技術解決了在沒有參考障礙物的情況下在格線區域停車的問題,當時自駕車的定位系統主要依賴GPS,因受限於定位精度,針對多弧線組成的停車路徑可能無法即時調整方向盤轉角修正循跡誤差,只能在各階段停車程序完成時檢查並修正下一階段路徑。
隨著自駕團隊的發展,自動駕駛車硬體設備增加360度光達等感知設備,Pacifica自動駕駛車硬體配置如圖2所示。同時完善點雲與高精語意地圖。在結合圖資與光達提升定位系統的精度後,自動駕駛車得到與停車空間更精確的相對位置資訊,停車過程中能更迅速的修正方向盤轉角,提升循跡能力,降低每一階段與目標位置的誤差,從而確保停入車格。
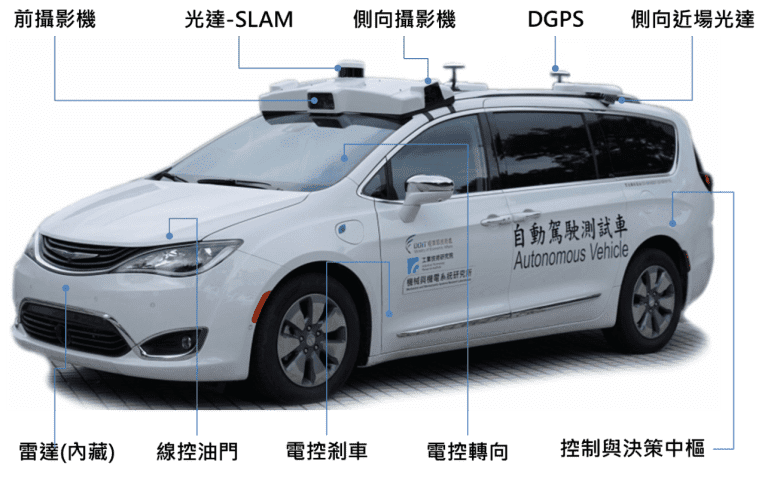
圖2 Pacifica自動駕駛車硬體配置