工研院資通所 張俊哲、徐維忻、劉得萱、林敏勤
很難想像在不久的將來,無論是大街上的大眾運輸、或是時下最火紅的外送服務,抑或是工廠裡穿梭的送貨車,這些原本仰賴人力的工作,都可能被自駕車所取代。自駕車如何安全駕駛的議題也逐漸受到關注:如何去監控、評估自駕車,或是更進階還原自駕車當時所發生的事件情境並針對問題修正,以達到更安全更完善的系統。本文將針對自駕車的監控與評估技術基礎下,進行自駕車監控管理平台開發技術之探討。

自駕車的車側資訊繁雜且量多,如何將資料全部完整接收儲存,並快速的從資料庫中精準查詢到所需的資訊,無疑是個挑戰。
技術與挑戰
一個完善的管理平台系統必須具備提供清楚且歸納之資訊,讓管理者能夠快速瀏覽評估狀況。如同前言所述,自駕車監控管理平台目的除了基本的監控之外,與傳統車隊管理系統最大差異,就是透過接收來自於自駕車特有的車控感測模組資訊及事件資訊,對自駕車作進一步的分析與評估後,再將評估數值結果立即反饋給自駕車,提供自駕車進行即時修正的依據。另外,當突發事件發生後,自駕車監控管理平台也可以調閱已接收的歷史資訊,統合事件當下來自車側不同模組的資訊進行時間同步與資料整合。並將整合後的資訊於監控管理平台完整還原,幫助自駕車開發者釐清問題、修正錯誤,進而提升自駕系統的品質。為了達成此目的,監控管理平台需確保來自車側的資料皆可正確無誤的被接收和儲存。然而自駕車的車側資訊不但繁雜且量多,一台車的回傳頻率為5Hz至20Hz不等。對於一個需要管控多輛自駕車的監控管理平台來說,如何將資料全部完整接收儲存,並快速的從資料庫中精準查詢到所需的資訊,無疑是個挑戰。
當每秒有上萬筆資訊流湧入,系統接收端若無一定的負載能力,將無力負荷來自多輛自駕車所回傳的資料;而資料庫若無良好的設計和正規化,儲存的資料即無法被快速的查找,便失去監控管理平台的功能性。監控管理平台採用的是模組化的系統架構,將呈現給使用者介面(user interface and user experience, UIUX)、資料庫(Database)、雲端空間(NAS)、串流接收伺服器(Streaming Server)以及資料接收處理模組(Middleware)分別獨立開來,確保各模組之間的獨立性以利分散風險負載程度。另外在資料接收處理模組設計上,會針對不同的資料特性做特殊處理。高頻率的資料接收時會批量對資料庫作進行儲存;而針對使用者介面所需要的即時資料呈現,則會採用雜湊技術(HashMap)將即時性的資料分類並往使用者介面送出。如此一來就能夠降低資料庫與雲端空間存取負載,並且加速不同車側來源或是不同類型資料的分配與呈現,進而提升使用者在系統使用上的品質。
即時監控系統
即時監控是一個能夠提供自駕車管理者快速掌握即時車側狀態和環境狀態的方式。透過即時監控,管理者就像是透過自駕車的「眼睛」,能夠「看到」自駕車所感知到的、偵測到的資訊。不論是車側本身的儀器數值,或是車側環境遇到的其他環境物件如道路、車輛、行人或障礙物等,都能夠清楚的呈現在即時監控的使用者介面上,以利管理者確認自駕車是否有如常的運行。

圖1 即時監控系統
自駕車監控管理平台所提供的即時監控系統包含(1)自駕車車側狀態、(2)自駕車行駛場域狀態、(3)自駕車營運服務狀態及(4)自駕車行駛環境狀態。自駕車車側狀態提供車輛運行狀態和與伺服器連線狀態;也提供了車輛即時設備數值,如速度、馬達內溫、馬達轉速、航向角和踏板深度等等。經由上述資料,能夠讓平台的管理者確認自駕車運行的狀態是否正常。但是除了透過人為判斷外,自駕車本身亦會偵測車側異常,並將異常訊息回傳至自駕車監控管理平台提供管理者參考並進行錯誤處理。
自駕車行駛場域狀態和自駕車營運服務狀態則屬於自駕車應用相關的環境監控。由於自駕車通常會為了某個目的在場域或一般道路上行駛,進行場域或是道路的監控亦為重要,而本平台將以自駕接駁作為說明案例。自駕車行駛場域狀態會將自駕車運行的場域號誌狀態呈現在使用者介面中,可供管理者確認自駕車是否有因循號誌狀態行駛,藉此確保自駕車的用路安全行。另外在接駁的服務中,管理者需要即時掌握每一輛自駕接駁車的乘載量。自駕車營運服務狀態提供管理者能夠即時查看每一條營運路線下的各站點候車人數;此外亦能查看每輛接駁車目前位置、行駛路線及載客人數。如此一來管理者即可透過監控功能檢視目前載運狀況並且即時判斷是否需要派調或調整接駁的車輛。
自駕車行駛環境狀態則提供管理者了解自駕車所感知到的周圍環境。如下圖所示,管理者能夠透過自駕車監控管理平台查看自駕車上所裝載的串流影像,亦能於影像中確認自駕車系統所偵測到的物件。除此之外,自駕車行駛環境狀態提供了光達點雲圖,讓管理者能夠看到自駕車依照所偵測感知到的資訊所建構出的行駛環境。藉由上述提到的監控功能不但提供使用者一個方便管理查看的平台,也讓開發人員能夠快速的檢視自駕車運行的狀態是否有按照指示進行,對於自駕車監控管理平台來說是個不可或缺的系統。

圖2 即時監控系統──自駕車行駛環境狀態
車輛軌跡分析
車輛軌跡資料在自駕車行駛過程中經由資料接收處理模組(Middleware)記錄到資料庫(Database),自駕車監控平台提供車輛軌跡的查詢功能,管理者由車輛軌跡可以檢視車輛行駛的路線、事件發生地點與發生時間以及車速等,也可以做為評估自駕車行車狀況的依據,像是自駕車在轉彎時是否有符合路口曲線、在變換車道是否有符合道路規定,以及自駕車在行駛過程駕駛模式的切換情形,而車輛軌跡對於自駕車開發人員來說,除更了解實車上路的情形外,也同時提供其行駛決策之修正方向。

圖3車輛軌跡查詢畫面
自駕車監控平台將車輛軌跡進行資料分析,根據軌跡資料時間與車速停等變化,歸納且計算成一段段自駕車行駛旅程,而自駕車行駛旅程統計該趟行程的行駛時間、行駛距離、平均行駛車速、自駕模式里程數、手駕模式里程數以及人為介入次數。自駕車監控平台提供管理者以穩健度和脫離率2個指標來判斷自駕車的行駛表現,其中穩健度係指自駕模式里程數占整趟旅程的總里程比例(愈高愈好);脫離率則是每公里中自駕車於自駕模式時經人為強制介入的次數計算而來(愈低愈好)。
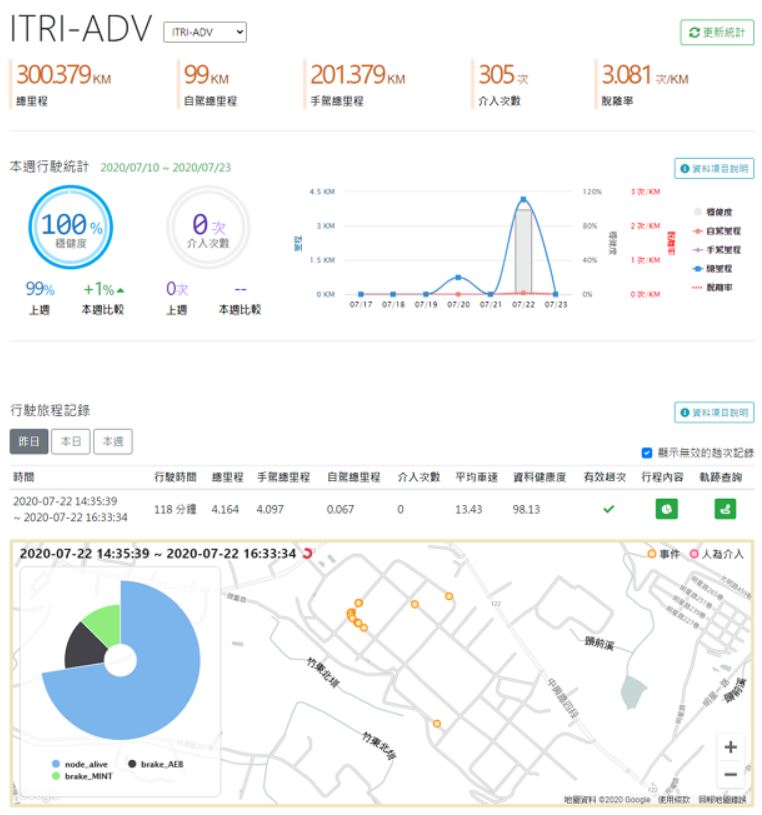
圖4 自駕車旅程分析
事件還原系統
事件還原系統主要的目的是要讓事件能夠被還原,透過時序一一將當下的情況呈現在使用者介面中。當自駕車發生不可預期的錯誤或特殊事件時,車側會透過已協議好的通訊協定將事件相關資訊打包並回傳到監控管理平台。而監控管理平台收到資料後會將不同的來源資料做時序的對齊,並分門別類後妥善記錄於資料庫中。日後自駕車開發團隊就可以隨時透過監控管理平台做搜尋事件請求,並針對有疑慮的事件進行還原。透過監控管理平台的事件還原系統取得串流影像與各車側間的資料同步,進而還原當時事件的發生的癥結點,並做為未來改善的依據。

圖5 事件還原系統
根據交通部道安規則以及經濟部推動的無人載具科技創新實驗條例中所定義的自駕車法規,當事故或故障發生時應保留事件發生前6分鐘之行車影像以及事件發生前30秒至後10秒之相關資訊,且相關紀錄應自事件發生日起保留3年。所以除了使用者介面提供的事故回溯功能外,監控管理平台還必須做到因應法規的資訊備份與保留機制。因此在架構上系統會於發生事件時額外觸發2個動作:其一為觸發串流接收伺服器,將事件發生時間點的前6分鐘影像備份至雲端空間;其二是監控管理平台提供車側透過協議好的通訊協定將最原始的紀錄資訊回傳至平台保存。藉由上述機制,平台得以兼顧功能實用性並同時符合法規,提升事件還原系統的服務與功能品質。
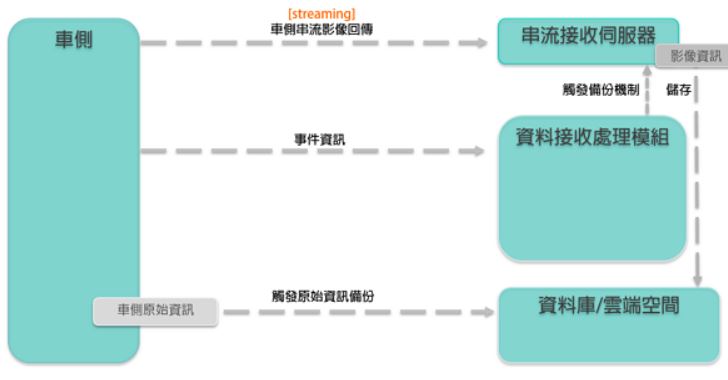
圖6 自駕車事件資料備份架構
結論
無論在何種領域自駕系統的普及已勢在必行,如果沒有妥善的紀錄和使用自駕系統的資料,再多再豐富的資料也只是成為毫無用處的資料孤兒。工研院資通所所開發的自駕車監控管理平台在資料紀錄與儲存上採用了批量紀錄與雜湊技術的處理,讓資料能夠有效且快速的被記錄和使用;而平台所提供的監控系統,可提供使用者能夠掌握自駕車的即時狀況,並透過事件還原系統,在事件發生後,給予工程師還原檢視事件以達到除錯目的。透過本平台,資料可有效被分析,紀錄的資料價值和意義亦能夠如實呈現於使用者介面中。對於自駕車開發團隊或是營運管理者來說,自駕車監控管理平台提供完善且可靠的服務,是自駕車系統不可或缺的助力。