工研院資通所 林港喬、黃譽維、曾恕康
自駕車相關應用是未來C-V2X或5G通訊技術的一項重要情境,如自駕車本身、自駕車與其他道路使用者(連網車、一般用路人……等)的交通安全及其效率型應用。本文將先介紹3GPP標準組織制定的C-V2X技術,再說明如何利用C-V2X通訊技術建構出與自駕車結合之3種應用系統。
C-V2X技術簡介
車聯網技術
車聯網技術一般稱為Vehicle-to-Everything(V2X),如下圖1,泛指車與車或是車與周遭所有和車相關的交通基礎設施溝通的通訊技術。除了汽車以外,道路上還有大客車,貨車、機車、腳踏車等各式車輛以及行人等各式用路人。
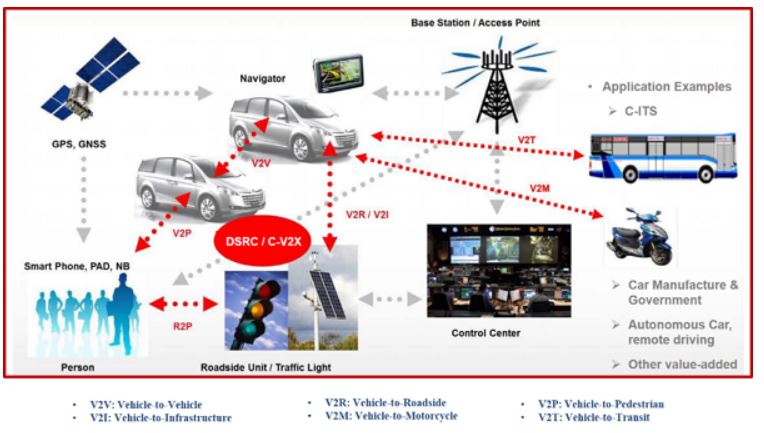
圖 1 車聯網技術示意圖
V2X中較常被使用的名詞包括V2V、V2I、V2N與V2P等。其中,V2I的I(Infrastructure)定義為交通基礎設施中的號誌或是路側設備;V2N的N(Network)定義為行動網路本身或是雲端後台。V2V則如字面說明是車與車之間的通訊。V2P的P(Pedestrian)指的是行人。至於相互溝通的技術,可以是車對車直接通訊,或是其他通訊方式,例如V2N2V間接通訊(車對網路再到車)。
美國運輸部US Department of Transportation(USDOT) 於2000年左右提出連網車(Connected Vehicles)的概念,目標是藉由上述V2X通訊技術提升道路安全(Road Safety)。主因為USDOT收集美國的車輛事故相關數據分析,有很高比例是車輛間彼此看不到對方而造成事故,如十字路口兩個方向的車被路口的建築物擋住視線,在看到後只有很短的時間進行反應,因而造成事故。此種為NLOS(Non-Line-of-Sight)的實際問題,用路人或車輛就算是加裝車用影像/雷達也會因無法偵測到可能相撞的來車導致事故發生,對於利用各感測器進行自駕車感測運行而言,NLOS也是棘手難題。
利用V2X解決NLOS問題,主要可行的解法是使用此通訊系統來廣播每一台汽車的位置相關資訊(如:GPS位置、車速、車頭方位等),連網車在接收周遭車輛位置相關資訊後,即可計算彼此相撞的可能性,如果風險很高,就立刻警示駕駛人以達到安全防撞的效果。
歐盟標準及著重的情境
目前European Telecommunications Standards Institute Technical Committee – Intelligent Transport Systems(ETSI TC-ITS)標準組織Working Group 1(WG1)已著手開始進行Release 2使用案例討論與標準草案制定,包括協同式可適應性巡航控制(Cooperative Adaptive Cruise Control, C-ACC)、列隊行駛(Platooning)、易受危害道路使用者(Vulnerable Road Users)、集體感知服務(Collective Perception Service, CPS)。
其中針對車輛與行人通訊提供行人警示服務。根據世界衛生組織公布的數據,全球每年有將近135萬人死於交通事故,其中行人和腳踏車騎士占全球道路交通死亡人數26%,機車騎士則占所有死亡人數的28%,而機車高度使用的東南亞地區所占比率更是提升到43%。為強化對行人、自行車、機車等交通弱勢族群的保障,ETSI目前也正著手制定弱勢道路使用者(Vulnerable Road Users, VRU)保護的標準[3],弱勢道路使用者包括:行人、輪椅使用者,嬰兒車、滑板、賽格威、速度在每小時25公里以下的自行車和電動自行車以及摩托車等。
近期5G汽車通訊技術聯盟(5G Automotive Association, 5GAA)也已於歐洲完成首個C-V2X情境展示,主要應用在車輛到基礎設施(V2I)與車輛間(V2V)碰撞預警,主要六大功能分別為:
- 十字路口碰撞警示(Intersection Collision Warning)。
- 車間通訊(V2V)實現緊急煞車預警(Emergency Electronic Brake Light)。
- 穿行轉向碰撞風險警示(Across Traffic Turn Collision Risk Warning)。
- 車輛與行人間的通訊(Vehicle-to-Pedestrian, V2P)提供行人警示功能(Vulnerable Road User Warning)。
- 車輛與基礎設施通訊(V2I)應用於號誌燈狀態提醒(Timing/Signal Violation Warning)。
- 車輛限速警示(Slow Vehicle Warning and Stationary Vehicle Warning)。
由此6項功能即可知道國際上未來汽車相關產業將會著重的應用及服務。
C-V2X車聯網標準
考慮到上述交通安全情境的需求,車聯網必須儘可能降低通訊的延遲(Latency)。USDOT在2000年時結合IEEE提出Dedicated Short Range Communication (DSRC)車聯網V2X技術。歐洲也幾乎同時提出基於相同IEEE 802.11p實體層底層的ITS-G5車聯網V2X技術。IEEE 802.11p為WiFi家族成員,在頻道使用上主要採用CSMA/CA類型的Multiple Access機制互相競爭的方式,也因此後來行動通訊網路標準組織3GPP在Release 14之後開始將Cellular-V2X(C-V2X)納入標準,且強調透過核網與基站進行資源管理可提供「保證的最大延遲(Guaranteed Maximum Latency)」機制。
在Release 14中,C-V2X規格主要分成Cellular V2V/V2I – PC5以及Cellular V2N – Evolved Multimedia Broadcast Multicast Services (eMBMS)這2個部分。PC5為針對原本行動通訊網路中終端只有透過Uplink,Downlink與基站進行通訊的基礎上加上終端間可直接互通的Sidelink;關於eMBMS則為將原本主要利用Unicast的電信網路加上可做Broadcast/Multicast的訊息傳播技術,可讓在一些情境下可更有效的利用資源。下圖即為C-V2X交通應用的情境架構。
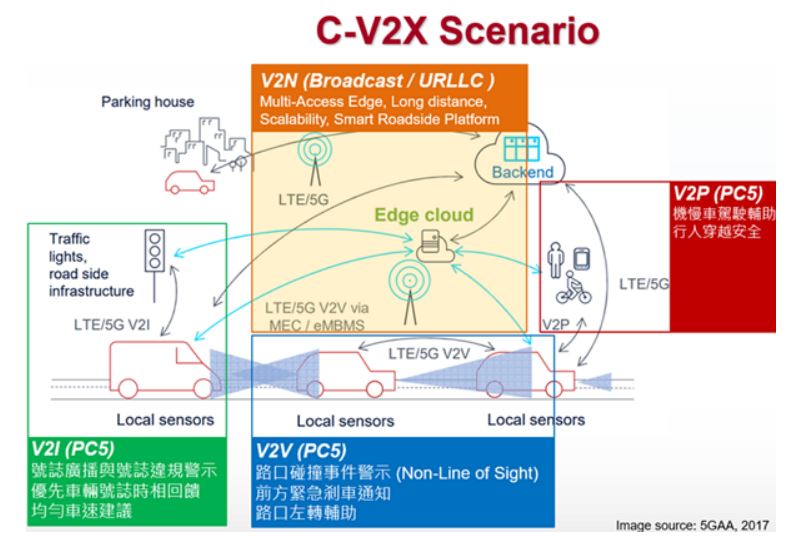
圖 2 C-V2X技術架構與交通應用情境圖
在上圖中除了V2I、V2V、V2P的PC5與V2N的eMBMS外,重點還有一個Edge cloud的架構存在,透過Edge cloud可將相關的應用運算不用回傳至Backend,直接於比較靠近終端的部分進行運算,並可直接透過eMBMS把運算結果產生的事件訊息廣播至特定區域內之終端裝置,利用此設計可讓電信網路可支援比較低延遲之車聯網應用。
以上為C-V2X通訊技術簡介,接下來將說明如何利用C-V2X通訊進行3種自駕應用與其架構。
C-V2X與自駕車結合之架構與應用
自駕車號誌燈態應用架構
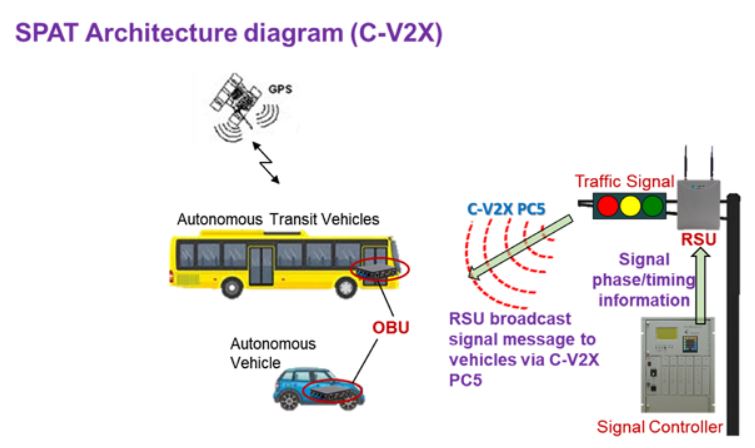
C-V2X SPaT自駕應用服務,可對接近號誌十字路口周邊的自駕車輛,廣播傳送動態的號誌燈態及秒數等資訊。RSU路側設備架設於十字路口,與十字路口的號誌控制器相連,RSU擷取號誌控制器的信號資訊(時相、時序等)後,封裝成SAE J2735的SPaT(Signal Phase and Timing)訊息格式,經由C-V2X PC5通訊技術廣播出去,OBU車上機安裝在車輛上,負責接收由RSU傳來的C-V2X PC5無線電波,OBU因而得知號誌控制器的信號資訊,同時結合GPS的定位資料,及車輛本身的資訊(車速、行進方向等),再做出對應安全駕駛指引予自駕車進行路口安全與針對號誌狀態進行車速調控。
自駕車優先號誌通行應用架構
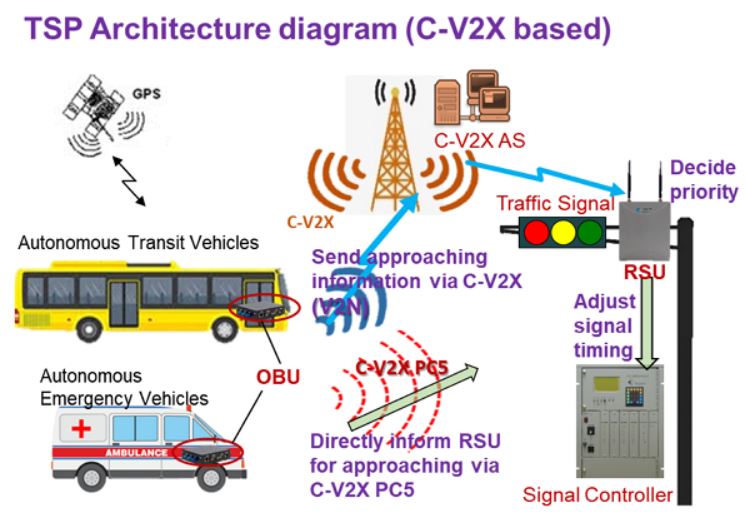
圖 4 C-V2X TSP交通應用架構圖
C-V2X可結合十字路口的紅綠燈號誌建置車輛優先號誌通行(Transit Signal Priority, TSP)應用系統,提供大眾運輸自駕車輛或緊急自駕車輛優先通行的服務。當優先自駕車輛接近號誌路口時,可透過自駕車上C-V2X OBU設備經由C-V2X通訊網路(可利用PC5即時傳輸或是利用一般V2N上行在遠處先行傳送)通知路口的C-V2X RSU路側設備,並傳送此自駕車之動態位置、行進路徑、車速等行車資訊,並提出優先號誌通行之需求。號誌路口的RSU收到合法自駕車輛的優先通行需求後,會根據該自駕車輛傳送的行車資訊,執行綠燈延長或紅燈截斷等優先通行控制策略,動態調整與控制紅綠燈號誌的時相狀態,在優先自駕車輛抵達號誌路口時將號誌調變為綠燈狀態,使得優先自駕車輛可以無阻的、快速的通過號誌路口。藉由C-V2X優先號誌通行應用服務,可大幅度縮短大眾自駕運輸車輛等優先自駕車輛的行進時間,提升自駕車之運輸效能。
自駕車Edge Cloud應用架構
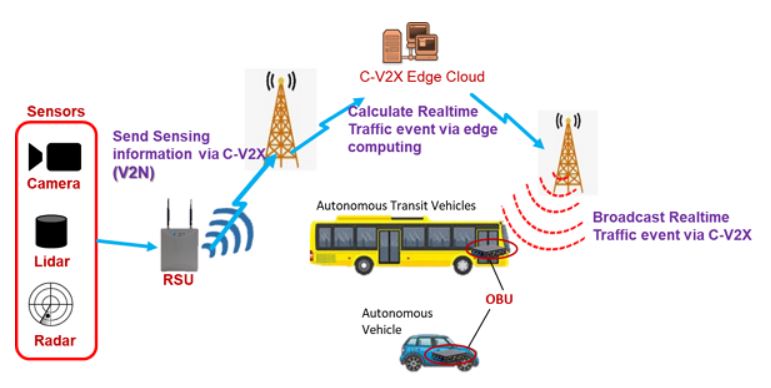
C-V2X可基於架設於重要路口RSU上的感測器資訊(包含影像、雷達或光達等感測器),利用Edge Cloud架構於Edge上計算可能會發生的交通事件與地點(如行人/其他車輛闖紅燈等臨時事件),再即時透過C-V2X eMBMS或也可再次透過RSU與C-V2X PC5於可能會受影響的地點附近進行廣播,透過自駕車輛上C-V2X OBU設備接收此資訊後就能即時在接近路口一段距離前進行相關事件的自駕決策反應,以進一步提升自駕車通過路口安全性。
結論
本文介紹了3GPP標準組織制定的C-V2X技術,包含以車對車直接通訊為主的蜂巢式V2V/V2I技術,和以基地台廣播為主的蜂巢式V2N技術與基本架構。且進一步說明如何利用C-V2X通訊技術建構出與自駕車結合之3種應用系統:號誌燈態應用、優先號誌通行應用與Edge Cloud應用,希望能拋磚引玉,引出未來更具創意之C-V2X自駕車結合服務。
參考文獻
[1] 3GPP TS 22.186, “Enhancement of 3GPP support for V2X scenarios; Stage 1,” V16.2.0 (2019-06)
[2] 3GPP TS 23.501, “System architecture for the 5G System (5GS); Stage 2,” V16.5.0 (2020-07)
[3] ETSI TR 103 300-1, “Intelligent Transport System (ITS); Vulnerable Road Users (VRU) awareness; Part 1: Use Cases Definition; Release 2,” V0.4.0
[4] SAE J2735, “V2X Communications Message Set Dictionary,” 202007